所属栏目:镗工实用技术
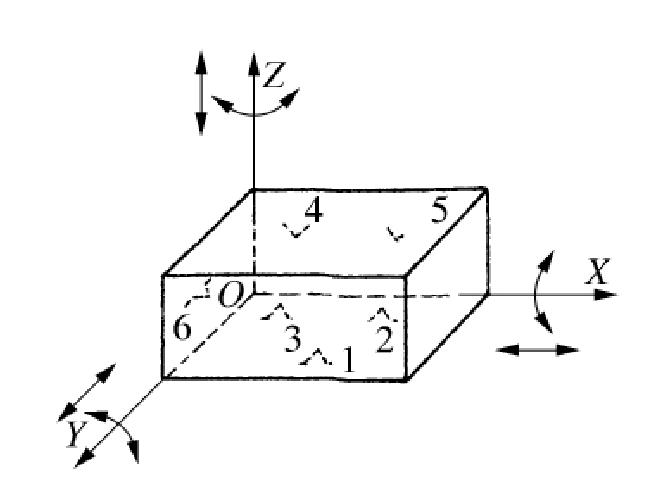
如图3.2-1所示,任何工件在空间有六个自由度,即沿空间三个互相垂直的坐标轴、、的移动和绕三个坐标轴、、的转动。如果工件的六个自由度用六个支承点与工件接触使其完全消除,这样工件的六个自由度都得到了限制,使工件具有确 ......(本文共 533 字 , 2 张图) [阅读本文] >>
 知识贝壳
知识贝壳