 APP
APP 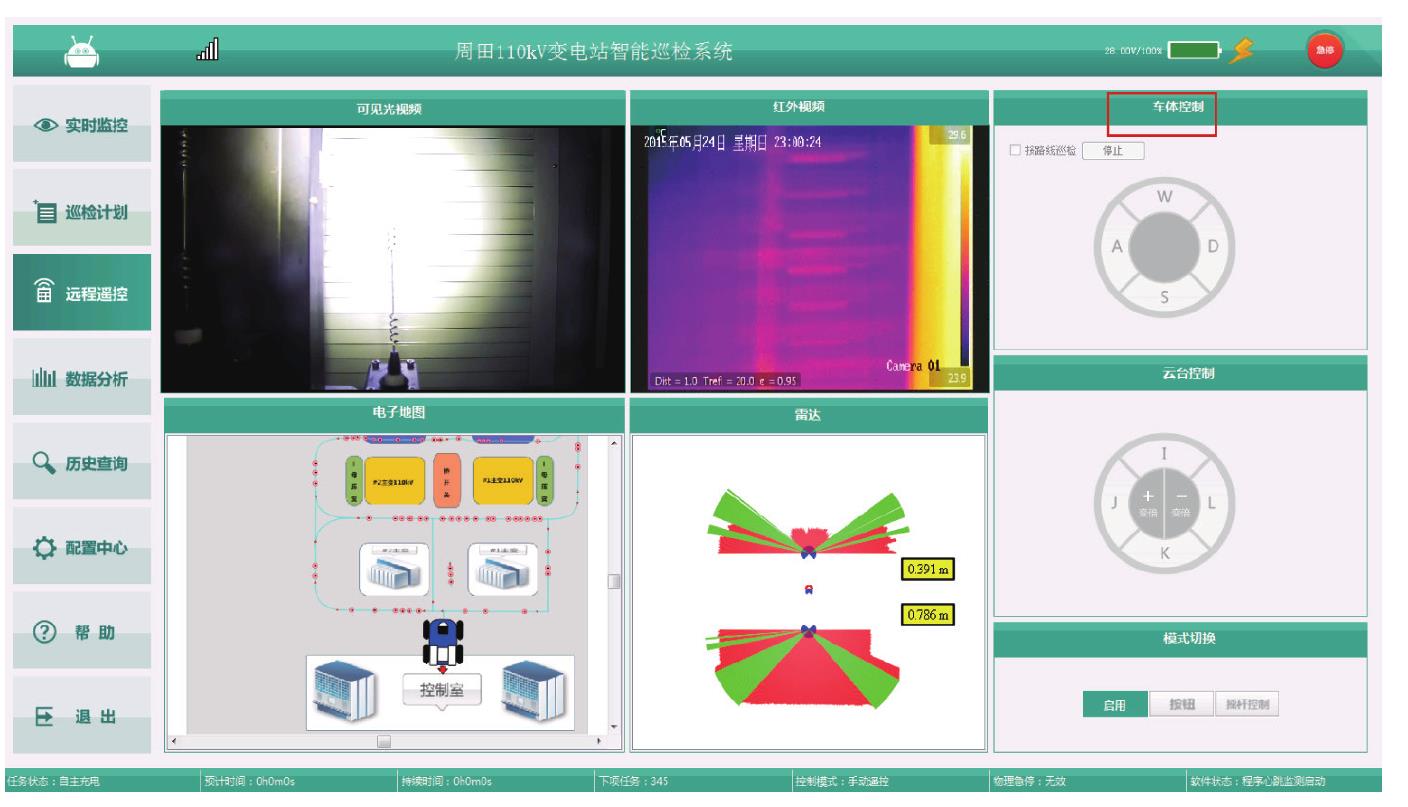
在【实时监控】界面中的“软件信息”中查看停障的具体原因。激光停障为机器人向后运动时遇到障碍物,超声停障为机器人在向前运动时遇到障碍物,碰撞停障为激光设备或超声设备故障的情况下遇到障碍物。确定障碍物的位置 (共 582 字) [阅读本文] >>
海量资源,尽在掌握
在【实时监控】界面中的“软件信息”中查看停障的具体原因。激光停障为机器人向后运动时遇到障碍物,超声停障为机器人在向前运动时遇到障碍物,碰撞停障为激光设备或超声设备故障的情况下遇到障碍物。确定障碍物的位置 (共 582 字) [阅读本文] >>
